


|
●平10(行ケ)131号
阻害要因が認められない事例/阻害要因/進歩性
| [事件の概要] |
| ①甲は、「ロボットを備えた箱処理装置」の発明について特許出願を行い、特許を得ました。本件特許明細書の特許請求の範囲に記載された請求項1の発明の内容は次の通りです。 「ロボットに設けられ、パレット(7)上に積層載置された箱(3)を把持してこれをパレットから下ろす箱把持ヘッド(2B)と、上記ロボットに設けられて上記箱把持ヘッドと選択使用され、上記箱内の物品を把持してこれを箱内から取出す物品把持ヘッド(2C)と、この物品把持ヘッドによって箱内から取出された物品を受取ってこれを外部に搬出する物品搬送手段(18)とを備えることを特徴とするロボットを備えた箱処理装置。」(符号は筆者が付記しました) 本発明(特公平06-102462) 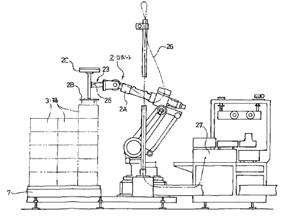 ②乙は、本件特許発明の進歩性の欠如を理由として特許無効審判を請求し、請求を退けられために審決取消訴訟を提起しました。 ③進歩性を否定する根拠とされた引用例1〜3の内容は次の通りです。 {引用例1の開示事項} 「3台の製造機〈1〉から一本のコンベアで運ばれてきた製品をロボット掴み位置にセットするための製品整列装置〈2〉と、自動製函機〈10〉と、製函された箱〈12〉を搬送するピッチ送りコンベア〈11〉と、製品を箱詰めする箱詰ロボット〈3〉と、該箱詰めロボットの後方に配置された自動梱包機〈4〉と、前記自動梱包機の後方に配置され、製品が箱詰めされた箱を自動パレット供給装置〈6〉から供給されたパレットに積載する積載ロボット〈5〉と、パレット送りコンベア〈7〉とから構成された製品箱詰パレタイジングー環ライン」 {引用例2の開示事項} (ア)引用例2の目的は、「製品の積み重ね作業と底紙や台紙のしき作業の両者を1つの機械で両立させることが可能な産業用ロボットのハンドを得ること」です。 (イ)引用例2の構成は、「製品7をその上下から把持するための、シリンダ21によって上下動され、製品の上面を押さえるための押さえ板28と製品の底面を押さえるフォーク16等から構成される把持手段と、底紙や合紙として使われるボール紙Sを吸引保持する、開閉するように設けられた一対のアーム35の先端に取り付けられたバキュームパッド42等により構成された吸引保持手段とを備え、把持手段と吸引保持手段を選択的に使用することにより、上記の如き2つの作業ができるようにした産業用ロボットハンド」です。 (ハ)引用例2の効果は、「2台のロボットを使用することなく、印刷物7の積み重ね作業と合紙等のしき作業の両方を確実に行うことができ、能率的な作業が可能となり、経済的である」です。 {引用例3の開示事項} 引用例3は、「パレット上に生ビール樽等の品物を荷積みする荷積みステーションに隣接してパレットが供給されるパレットステーション及び品物が供給される品物ステーションを配設し、荷積みステーションに立設した支柱と、該支柱に上下動可能に取り付けられた昇降体と、該昇降体に沿って上記各ステーション間を水平移動可動な移動体とを有しており、該移動体には昇降体に直交する水平方向で間隔をあけて設けられ開閉可能な一対のパレット把持用アームと、昇降体の長さ方向で間隔をあけて設けられ開閉可能な一対のガイド体及び同方向で移動可能なフオーク体からなる品物把持用手段とを設けたパレットと1段分の品物とを交互に積み重ねることができるパレット荷積み装置」が開示しています。 ④審決の要点 (イ)引用例1は、本件特許発明の技術的課題を有しない。 (ロ)引用例1は、箱詰ロボットと積載ロボットの間に自動梱包機を配置する構成を採り、箱詰ロボットと積載ロボットとが空間的に離れた位置に存在していることから、両ロボットの2つの機能を1台のロボットで実現するということを想起することも困難である。 ⑤甲の主張は次の通りです。 (イ)本件発明の技術課題は、従来ケーサとパレタイザの2台のロボットを用いていたので大きなスペースを必要とするとともに高価となっていたという点にあり、他方、原告の主張する省スペース、省コストは、極めて一般的な技術課題であり、このような普遍的な技術課題が引用例1にあるからといって、引用例1に上記の本件発明の具体的な技術課題が示されていることにはならない。 (ロ)引用例1が、従来ケーサとパレタイザの2台のロボットを用いていたので大きなスペースを必要とするとともに高価となっていたという本件発明の具体的技術課題を有していないことは上記のとおりであるが、これに加え、引用発明1の箱詰ロボット(ケーサ)と積載ロボット(パレタイザ)が、その間に自動梱包機が配置されているため、空間的に離れた位置に存在することによって、ケーサとパレタイザを1台のロボットとする発想を得ることはより困難となるものと考えられ、箱詰ロボットと積載ロボットの両ロボットの2つの機能を1台のロボットで実現するということを想起することも困難であるとした審決の判断に誤りはない。 |
| [裁判所の判断] |
| ①裁判所は、引用例1が本発明の課題を有するか否かに関して次のように判断しました。 “乙は、省スペース、省コストが、ロボットを用いた作業ラインにおいても常に求められるものであり、従来技術に内在する極めて一般的な技術課題であると主張する。しかしながら、省スペース及び省コストの課題(は)、…それ自体、極めて一般的、かつ、抽象的な課題であるところ、産業用ロボットの技術分野において、それが何らかの課題対象を特定して、周知の具体的技術課題として顕在化しているような状況を窺うことはできない。…パレット上の箱を下ろす作業と箱内から物品を取り出す作業、あるいは箱内へ物品を収容する作業と箱をパレット上に積層載置する作業を、それぞれ別々の2台のロボットにより行っていたため、装置全体を設置するために大きなスペースを必要とするとともに高価となっていたという(本発明の)具体的技術課題は、省スペース、省コストという程度の一般的抽象的な技術課題と同列に論じられるものではない。”  ②裁判所は引用例2〜3の技術的意義に関して次のように判断しました。 “当業者が、このような引用例2、3に開示された技術を見た場合に、2つの異なる作業を単一のロボット装置で行うことを課題として、別個の作業機能を備えた2つの把持(保持)手段を単一のロボットに備えることにより、この2つの作業を単一のロボットで選択的に実行する技術思想を把握すること、及びそのようにすることに、当該2つの作業を別々の2台のロボットで行う構成と比較して、装置全体の設置スペースを小さくできるとともに、安価に製造することができるという技術的意義が存在するものと理解することは、容易なことである” ③裁判所は、上述の阻害要因の議論に関して次のように判断しました。 “一般に、物品を箱詰めしてパレット上に積載する箱処理装置において、物品を箱内に収容した後に箱を梱包することを要するかどうか、また梱包するとしてもどの段階においてすることを要するかについては、様々な形態があり得るものと考えられ、自動梱包機を設置するかどうか、設置するとしてもどのように配置するかということは、これらの形態等に応じて適宜に選択することのできる事項にすぎないものと認められる。したがって、引用発明1に、引用例2、3に示された、別個の作業機能を備えた2つの把持(保持)手段を単一のロボットに備えることにより、2つの作業を単一のロボットで選択的に実行する技術思想を適用するに当たって、該自動梱包機の存在が妨げになるものということはできず、審決の前示判断は誤りというべきである。” |
| [コメント] |
| ①特許庁の審査基準には、“一定の課題を解決するために公知材料の中からの最適材料の選択、数値範囲の最適化又は好適化、均等物による置換、技術の具体的適用に伴う設計変更などは、当業者の通常の創作能力の発揮である”旨が記載されています。箱詰ロボット→自動梱包機→積載ロボットという順序を有する引用例1の構成に、引用例2に一つのロボットに複数の作業を行わせるという技術的思想を適用する場合に、自動梱包機を省略して箱詰ロボットと積載ロボットとを一つのロボットとするときに、自動梱包機の省略は、進歩性審査基準中の“技術の具体的適用に伴う設計変更”に相当すると考えられます。 ②主引用例の発明の構成要件中の一部を省略することが、単なる設計変更といえない場合もあります。一部の要件が発明の本質的要素であり、それを省くと発明が成り立たないとか、技術的な意味が変ってしまう場合です。 ③しかしの場合には、自動梱包機を省略してもロボットを用いた作業ラインの発明が成立しなくなるわけでも、技術的な意義が変るわけではないので、裁判所の見解は妥当と思われます。 |
| [備考] |
| 進歩性審査基準で引用された事例 |
| 戻る |
今岡憲特許事務所 : 〒164-0003 東京都中野区東中野3-1-4 タカトウビル 2F
TEL:03-3369-0190 FAX:03-3369-0191
営業時間:平日9:00〜17:20
今岡憲特許事務所TOPページ | はじめに | 特許について | 判例紹介 | 事務所概要 | 減免制度 | リンク | 無料相談
Copyright (c) 2014 今岡特許事務所 All Rights Reserved.