


|
●平成30年(行ケ)第10122号(II)(審決取消訴訟・棄却→取消)
進歩性/特許出願/阻害要因/水中音響測位システム
| [事件の概要] |
|
(a)本件は、特許第5769119号の特許権に対して進歩性欠如・サポート要件の欠如・新規事項追加禁止違反を理由とする無効審判の審決(請求棄却)に対する審決取消訴訟です。 裁判所は、進歩性・サポート要件に関しては取消理由なしとし、他方、新規事項の追加禁止に関して取消理由ありとして、審決を取り消しました。 以下、このレポートでは新規事項の追加に関する事柄を報告します。進歩性に関しては下記を参照して下さい。 (b)被告は、平成25年9月24日、発明の名称を「水中音響測位システム」とする特許出願(特願2013-196594号)をし、明細書及び特許請求の範囲について補正をした上で、平成27年7月3日、前記特許の設定の登録を受けました。 (c)原告は、平成29年9月29日、本件特許の請求項1及び2に係る発明につき無効審判を請求しましたが(無効2017-800130号)、特許庁が平成30年7月17日、「本件審判の請求は、成り立たない。」との審決をしたため、平成30年8月27日、その審決の取消しを求めて、本件訴訟を提起しました。 [特許発明の内容] {背景技術} ・海底の歪み調査は、多くの海底局を設置して、地殻変動による地震の予知を長い間に渡って行っている。前記海上保安庁の設置した海底局は、自分の呼び出されたIDコードによって、測距信号を送り返すようになっていた。前記海上保安庁が設置した海上局は、既に相当な数に及んでいる。 従来の水中音響測位システムは、既製のシステムが利用できるというメリットがある代わりに、船上局からIDコードおよび測距信号を送信した後、海底局で受信し、前記測距信号に全て同じIDコードを付けて返信するようになっていた。 前記データの送受信時間は、長くかかるため、海水温度および塩分濃度の変化が一定でない場合が多く、正確なデータを得ることができなかった。 そこで本出願人は、先の特許出願にて、船上局がそれぞれの海上局(海底局の誤記?)に対して、同じIDコードと同じ測距信号を一斉に送り、前記海上局からそれぞれ別々のIDコードと前記同じ測距信号を船上局に返信する水中音響測位システムを提案した。 このシステムによれば、送受信が一斉に行われるため、測定にかかる時間が短縮でき、正確なデータを多く得ることができる。しかし、前記水中音響測位システムは、前記海上保安庁が設置した海底局に付けられているIDコードをそのまま利用することができないという問題点があった(中略)。 {発明の目的} 本発明は、船上局からの異なるIDコードおよび測距信号をそれぞれの海底局へ一定の時間差をもって送信するとともに、前記海上局から同じIDコードおよび異なる前記測距信号が届いた順に返信信号として送信することにより、前記船上局でそれぞれ受信した後、解析することにより、誤差の少ない地殻変動を調べることができる水中音響測位システムを提供することを目的とする。 また、本発明は、船上局と海底局との間において、IDコードおよび測距信号をそれぞれ海底局へ一定の時間差をもって送受信した後、これらの信号を解析することにより、誤差が更に少ない地殻変動を調べることができる水中音響測位システムを提供することを目的とする。 {発明の構成} 本件特許発明の請求項1の構成は次の通りです。 A 陸上におけるGPS観測データを基準としたGPSを備えている船上局から送信した音響信号を海底に設置された複数の海底局でそれぞれ受信し、それぞれの海底局から前記音響信号を前記船上局へ送信することによって、前記海底局の位置データの取得密度を向上して収集することができる水中音響測位システムにおいて、 B 前記船上局から各海底局に個別に割り当てられるIDコードおよび測距信号からなる音響信号をそれぞれの前記海底局に対して互いに混信しない最低の時間差をもって送信する船上局送信部と、 C 前記船上局送信部からの音響信号をそれぞれ受信するとともに、受信した前記音響信号中の前記IDコードが自局に割り当てられたものである場合にのみ、前記全ての海底局に予め決められた同じIDコードであって海上保安庁が設置した既存の海底局において用いられるM系列コードを、受信した前記音響信号中の測距信号に付し、前記船上局から送信した前記音響信号が届いた順に直ちに返信信号を送信する海底局送受信部と、 D 前記それぞれの海底局送受信部から届いた順に直ちに返信された各返信信号を一斉に受信する一つの船上局受信部と、 E 前記一つの船上局受信部において、前記各返信信号およびGPSからの位置信号を基にして、前記海底局送受信部の位置を決めるための演算を受信次第直ちに行うことができるデータ処理装置と、 F から少なくとも構成されていることを特徴とする水中音響測位システム。 {発明の効果} (a)本発明によれば、IDコード(S1、S2、・・・)および測距信号(M1、M2、・・・)は、船上局から一定の時間差をもって海底局に送信された後、それぞれの海底局から同じIDコードS6を付けるとともに、それぞれの海底局に測距信号(M1、M2、・・・)が届いた順に返信することにより、短時間で、多くの観測点から地殻変動を知るための正確なデータを得ることができる。 (b)本発明によれば、前記船上局からのIDコードおよび測距信号は、一定の時間差をもって海底局に送信された後、前記海底局から全て同じIDコードS6を付けて返信されるため、既設の海底局を利用することができ、音響信号の送受信にかかる時間を短縮することができるだけでなく、安価で正確なデータを短時間で収集することが可能である。 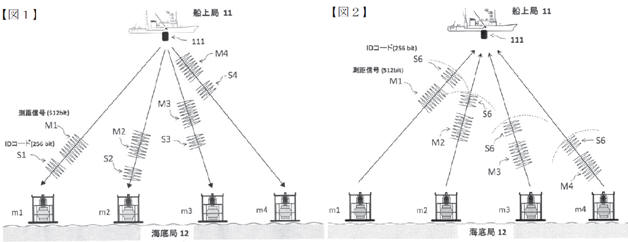 [審決の内容] (A)審決の概要は次の通りです。 ・本件補正は、本件当初明細書等に記載した事項の範囲内においてされたものであるから、特許法17条の2第3項に規定する要件に適合する。 ・本件特許は、サポート要件(特許法36条6項1号)に適合する。 ・本件発明1及び2は、「文部科学省研究開発局、国立大学法人東北大学『海底地殻変動観測技術の高度化(平成23年度)成果報告』、平成24年5月」(甲2。以下、各証拠に係る文献を証拠番号に従って「甲2文献」などといい、甲3の1文献及び甲3の2文献を併せて「甲3文献」という。)に記載された発明(以下「甲2発明」という。)と甲3文献ないし甲6文献に記載された構成に基づいて、当業者が容易に発明をすることができたものであるとはいえない。 (B)以下、進歩性に関する審決理由を解説します。 (a)審決で認定された甲2発明の内容 a2 陸上におけるGPS観測データを基準としたGPSを備えている船上局から送信した音響信号を海底に設置された複数の海底局でそれぞれ受信し、それぞれの海底局から前記音響信号を前記船上局へ送信することによって、前記海底局の位置データの取得密度を向上して収集することができる複数海底局同時測距システムであって、 b2 前記船上局から各海底局に個別に割り当てられるヘッダ信号及び各海底局に共通に割り当てられる測距信号を含む音響信号をそれぞれの前記海底局に対して235.678ミリ秒の時間差をもって送信する船上局送信部と、 c2 前記船上局送信部からの音響信号をそれぞれ受信するとともに、受信した前記音響信号中の前記ヘッダ信号が自局に割り当てられたものである場合にのみ、前記全ての海底局に予め決められたヘッダ信号を、受信した前記音響信号中の測距信号に付し、前記船上局から送信した前記音響信号が届いてから1048.576ミリ秒後に返信信号を送信する海底局送受信部と、 d2 前記それぞれの海底局送受信部から返信された各返信信号を受信する一つの船上局受信部と、 e2 前記各返信信号及びGPSからの位置信号を基にして、前記海底局送受信部の位置を決めるための演算を各返信信号の受信後に行うことができるデータ処理装置とを備え、 g2 前記ヘッダ信号の送信を開始してから測距信号の送信終了までの時間差は、514.322ミリ秒であり、前記測距信号の送信終了から次のヘッダ信号の送信開始までの時間差は、235.678ミリ秒である f2 複数海底局同時測距システム。 (b)本件発明と甲2発明との相違点 〈相違点1〉 本件発明1は、「測距信号」が「各海底局に個別に割り当てられる」のに対し、甲2発明は、「測距信号」が「各海底局に共通に割り当てられる」点。 〈相違点2〉 本件発明1は、「全ての海底局に予め決められたIDコード」が「同じ」「であって海上保安庁が設置した既存の海底局において用いられるM系列コード」であるのに対し、甲2発明は、「前記全ての海底局に予め決められたヘッダ信号」(本件発明1の「全ての海底局に予め決められたIDコード」に相当する。)がどのようなものか明らかでない点。 〈相違点3〉 本件発明1は、「データ処理装置」が「前記各返信信号およびGPSからの位置信号を基にして、前記海底局送受信部の位置を決めるための演算を受信後に行う」場所及び時期が「一つの船上局受信部において、」「受信次第直ちに」であるのに対し、甲2発明は、その場所が明らかでなく、その時期が「受信後に」とされるにすぎない点。 〈相違点4〉 本件発明1は、「前記それぞれの海底局送受信部から届いた順に直ちに返信された各返信信号を」「受信する」態様が「一斉に」であるのに対し、甲2発明は、その態様が明らかでない点。 (c)甲3文献記載の構成 b3 船上局(海上装置)からの測距信号(M系列信号)が各海底局(海底装置)に個別に割り当てられないが、海底局ごとに異なる測距信号(M系列信号)が船上局に返信される点。  [取消理由/原告の主張] (A)取消事由1として新規事項の追加の判断の誤りが、取消事由2として、サポート要件適合性の判断の誤り、取消事由3として容易想到性の判断の誤りが挙げられました。裁判所は、取消事由2~3に関して理由なし、取消事由1に関して理由ありと判断しました。 以下、このレポートでは取消事由3のみに関して説明します。 取消事由1に関しては下記を参照して下さい。 →平成30年(行ケ)第10122号(I) (B)相違点の容易想到性判断の誤り ア 相違点1に関して (ア) 甲3文献記載の構成 尾鼻浩一郎「Development of Seafloor Positioning System with GPS-acoustic Link for Crustal Dynamics Observation」1998年12月,論文目録、表紙、目次、95頁~112頁(甲3の1)には、次の甲3構成b3(原告)が記載されている。 b3(原告) 海底局ごとに異なる測距信号(M系列信号)が船上局に返信される点。 (イ) 甲2発明に甲3構成b3(原告)を適用することは容易に想到できること a 次のとおり、当業者には、甲2発明に甲3構成b3(原告)を適用することの動機づけがある。 (a) 甲2文献及び甲3文献は、いずれも海中音響測距技術に関するもので、技術分野が共通し、同時測距による測定時間の短縮という課題、作用、機能も共通する。 (b) そして、甲2発明では、測定時間を短縮するために、船上局が海底局からの測距信号を一斉に受信する。そして、観測船が2つの海底局との距離が同じ地点、すなわち、2つの海底局を結ぶ線分の垂直二等分線上のある程度の幅をもつ領域(以下「中間領域」という。)にいる時間はたかだか5分程度と限られているから、大きな問題にはならないと考えられるとして、一斉受信の際に、どの海底局からも同じ測距信号がミラー応答の方式で船上局に返信される。 これに対し、甲3文献記載の技術では、測定時間を短縮するために、船上局が海底局からの測距信号を一斉に受信するが、その一斉受信の際に、海底局ごとに異なる測距信号がミラー応答ではない方式で船上局に返信される。 そして、当業者において、より多くの時間帯でより高精度、より簡便に測定ができるように工夫するのは当然のことである。 (c) また、海底局は電池寿命が到来するまで10~15年間程度使用され、その更新時期までは既存の海底局をそのまま使用しなければならないから、一般に、船上局と海底局とを有する水中音響測位システムを改良するには、船上局とその送信信号を改良するしかない。 そのため、水中音響測位システムの創作に際し、当業者は、① 船上局の送信信号を変えれば、船上局の受信信号は既存の海底局の仕様に応じて自動的に決まる、② 船上局の受信信号を変えるには、船上局の送信信号を既存の海底局の仕様に応じて自動的に決まるものとしなければならない、との認識を有しており、船上局の送信信号と受信信号とが一連不可分のものであるとの認識は希薄である。そして、当業者においては、船上局の受信信号をまず考え、その後に海底局の仕様(ミラー応答方式であるか否かも含む。)に合わせて船上局の送信信号を考えるという発想も、ごく自然である。 (d) したがって、甲2発明において、観測船が中間領域にいる5分程度の限られた時間についても同時測距を万全に行うことを考えれば、当業者は、甲2発明の「一斉受信の際にどの海底局からも同じ測距信号が船上局に返信される」との構成を、甲3構成b3(原告)、すなわち、「一斉受信の際に海底局ごとに異なる測距信号が船上局に返信される」との構成で置換する。この際、甲2発明の海底局がミラー応答方式を採用していれば、必然的に、船上局から各海底局に個別に割り当てられた異なる測距信号が送信されることになり、相違点1に係る本件発明1の構成に至る。 b なお、甲2文献と甲3文献とでは、ミラー応答方式であるか否かの違いがあるものの、その違いは単なる技術的な選択事項にすぎないから、両文献の記載事項を組み合わせることの阻害要因とならない。 (ウ) 以上によれば、相違点1に係る本件発明1の構成は、甲2発明と甲3文献に記載された構成(甲3構成b3(原告))に基づいて当業者が容易に想到できたというべきである。 したがって、この点についての審決の判断は誤りである。 [被告の主張] (2) 相違点の容易想到性判断の誤りについて ア 相違点1に関して (ア) 甲2発明に甲3構成b3を適用する動機づけはないこと 原告は、観測船が中間領域にいる5分程度の限られた時間についても同時測距を万全に行うことを考えれば、当業者は、甲2発明に甲3構成b3を適用すると主張する。 しかし、甲2文献では、当該収録方式には海上局から等距離にある海底局からの測距信号が重なってしまうとの課題があることを指摘しつつ、大きな問題とならないとして、この課題を解決しようとしていない。したがって、甲2文献の記載に接した当業者が、測距信号を各海底局に共通に割り当てるものから、本件発明1のように測距信号を各海底局に個別に割り当てられるものに変更するよう動機づけられることはない。 また、甲3文献にも、測距信号を各海底局に共通に割り当てる方式における課題やそれを示唆する記載はないから、甲3文献に接した当業者において、その課題を解決する手段として、測距信号を各海底局に個別に割り当てる方式(相違点1に係る本件発明1の構成)に変更するよう動機づけられることはない。 (イ) 甲2発明に甲3構成b3を適用することには阻害要因があること a 次のとおり、ミラー応答方式である甲2発明に、ミラー応答方式でない甲3構成b3を適用することには、阻害要因がある。このことは、原告が主張する甲3構成b3(原告)を前提としても同様である。 →阻害要因とは b 一般に、船上局から送信された音響信号は、海底局に届くまでの水中伝搬中に、様々な影響を受けて減衰する。そして、船上局と海底局との距離が遠いなどの理由でID信号が大きく減衰する場合には、海底局で受信したID信号が自身のIDと合致するか否かを判断するID識別処理に時間を要する。 そのため、ミラー応答方式でない海底局は、ID識別処理後、自身に予め記録された測距信号(及び自身のID信号)を船上局に送信するため、ID識別処理に時間を要した分、測距信号が遅れて送信される。したがって、この影響を受けることで測定の精度が落ちる。 これに対し、ミラー応答方式の海底局は、音響信号を受信すると同時に、その音響信号を記憶し、記憶した測距信号そのもの(及び自身のID信号)を、ID識別処理に要する時間にかかわらず、船上局に送信する。したがって、測距信号の遅れがなく、測定の精度が高い。 このように、海中音響測距において、ミラー応答方式とミラー応答方式でない技術とは、単なる技術的な選択事項ではないし、そもそもの作用、機能も異なる。 (ウ) 甲2発明に甲3構成b3を適用しても相違点1に係る本件発明1の構成とならないこと 甲2発明はミラー応答方式であるのに対し、甲3構成b3が前提とする技術はミラー応答方式でないから、仮に、甲2発明に甲3構成b3を適用すると、甲2発明は、ミラー応答方式からそうでないものに変更される。さらに、海底局ごとに異なる測距信号が船上局に返信される構成をミラー応答方式で実現しようとすると、ミラー応答方式でない海底局を前提とする甲3構成b3を適用したことの意味が失われてしまう。 仮に、甲3構成b3(原告)を改めて認定したとしても、そもそも、船上局から海底局に送信される測距信号と、海底局から船上局に返信される測距信号とが、原則として必ず一致するミラー応答方式において、原告が主張する相違点1のように、「船上局から海底局に送信される測距信号」と、「海底局から船上局に返信される測距信号」とを敢えて区別した上で、そのうちの「海底局から船上局に返信される測距信号」のみを都合よく抜き出し、この測距信号のみを置換することは、ミラー応答方式の前提を欠くものであって、極めて不自然である。 |
| [裁判所の判断] |
|
①裁判所は、容易想到性の判断に先立ち、甲2発明の内容を次のように認定しました。 (A)甲2文献には次の記載がある。 「1.移動観測における高精度かつ高効率な海底地殻変動観測・解析技術の開発…の研究課題では、海上のGPS測位と海中の音響測位を結合したGPS音響結合方式の海底精密測位の繰り返しにより海底地殻変動を観測する手法において、船を用いて観測点の周囲を移動しながら観測する方法により、高精度かつ高効率な観測を実現するために必要な観測システム及び解析手法を開発することを目的としている。」(iii頁) 「3.1 移動観測における高精度かつ高効率な海底地殻変動観測・解析技術の開発」(2頁) 「効率的な広域高密度観測が可能なシステム開発のため、最低でも既存の3つの海底局との間をほぼ同時に測距できる複数海底局同時測距システムの基本設計を得た。」(6頁) 「複数海底局との間の完全な同時測距を行うためには海底局の改造も必要となる。しかし、既設の海底局がまだ寿命を迎えていないため、既設の海底局の有効利用も念頭に置いて、海底局の改造を行うことなく、現有の海底局との間での同時測距も可能なシステム設計とした。 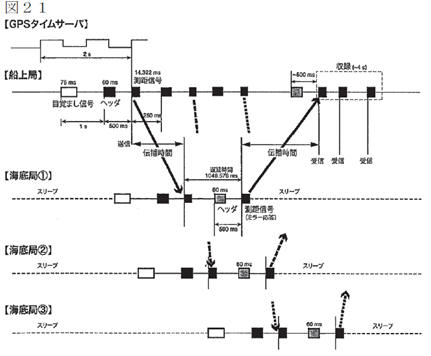 設計した複数海底局同時測距システムの概念図を図21に示す。海上局からは、スリープ状態にある海底局を起こすための目覚まし信号と測距する海底局を指定するヘッダ信号に続いて測距信号を送信する。目覚まし信号は全海底局に共通なため1つとし、ヘッダ信号と測距信号のペアを3回送信する方式とした。現有の海底局は、海上からの測距信号を受信した後に、海上局に返信を知らせるためのヘッダ信号を測距信号の前に付けて返信する。…ただし、この収録方式では、海上局から等距離にある海底局からの測距信号が重なってしまう。」(28頁) また、図21中には、海底局が返信する測距信号につき、「ミラー応答」である旨が記載されている。 (B)上記において認定した甲2文献の記載内容によれば、甲2発明の特徴として、次の点を指摘することができる。 “甲2発明の技術分野は、GPS及び音響測位を用いた複数海底局同時測距システムである。そして、その解決しようとする課題は、既設の海底局を改造することなく有効利用しつつ、海底局との間での複数海底局同時測距を実現し、効率的な広域高密度観測が可能なシステムを開発することである。 そして、その課題解決手段として、甲2発明の構成c2が特定する海底局送受信部を前提とし、船上局から各海底局に対し、同構成b2が特定するように、各海底局に個別に割り当てられるヘッダ信号及び各海底局に共通に割り当てられる測距信号を含む音響信号を送信する点に技術的意義を有する。” ②裁判所は、また甲3発明の内容を次のように認定しました。 (A)甲2文献には次の記載がある。 「本研究では、海底での地殻変動観測を行うための海底測位システムの開発を行った。…この観測システムは、GPSによる移動体のキネマティック測位と、音波を用いた音響測距を組み合わせたものである。…音響測距に於いては、海上-海底装置間の音波の往復送時が計測される。」(要約287頁) 「第4章では、複数の海底基準点に対して音響測距を多重化して同時に行う方法を示している。」(要約288頁) 「4.2 多重音響測距」(本文100頁) 「4.2.2 海底基準点のための実験 …この実験において、3000、3001及び3002と番号付けされた3つの海底基準点が使用された。…海上装置が海底装置3000を呼び出す時、全ての3つの海底装置は、異なるM系列により変調された音響信号を返信する。」(本文104頁) 「多重音響測距において、全ての3つの海底基準点装置は、海上装置からの単一呼び出しに対して信号を返信する。」(図4.6の説明。本文106頁) また、図4.6(106頁)には、多重音響測距においては、海上装置が単一の信号を送信して各海底装置(海底基準点)を呼び出し、各海底装置は単一の信号を海上装置に返信する態様を示す図が記載されている。 (B)上記において認定した甲3文献の記載内容によれば、甲3発明の特徴として、次の点を指摘することができる。 「複数の海底基準点に対して音響測距を多重化して同時に行う多重音響測距により海底での地殻変動観測を行うための海底測位システムであって、GPSによる移動体のキネマティック測位と、音波を用いた音響測距を組み合わせ、音響測距に於いては、海上-海底装置間の音波の往復送時が計測されるものであり、海上装置が3つの海底装置それぞれに対して海底装置を呼び出すための単一の信号(以下「多重測距信号」という。)を送信し、各海底装置が多重測距信号を受信すると、海底装置ごとにそれぞれ異なるM系列により変調された単一の音響信号(以下「返信信号」という。)を海上装置に返信する海底測位システム。」 ③裁判所は、前記甲2発明及び甲3発明の認定に基づいて、相違点1の構成に対する容易想到性について次のように判断しました。 (A) 先に認定したとおり、甲2発明の技術分野は、GPS及び音響測位を用いた複数海底局同時測距システムである。そして、その解決しようとする課題は、既設の海底局を改造することなく有効利用しつつ、海底局との間での複数海底局同時測距を実現し、効率的な広域高密度観測が可能なシステムを開発することにある。 そうすると、甲2発明と甲3発明とは、GPS及び音響測位を用いた複数海底局同時測距システムという同じ技術分野に属し、かつ、複数海底局同時測距を実現するとの点で課題が一致していると認められる。 (B)しかし、甲2発明では、既設の海底局を改造することなく有効利用するとの課題を解決するために、海上局と海底局との間でやりとりする音響信号はヘッダ信号と測距信号とを含むものとし、かつ、海底局は測距信号をミラー応答することを、その技術的特徴としている。 他方、甲3発明では、海上局と海底局との間でやりとりする音響信号が、ヘッダ信号及び測距信号などの区別がない単一の信号からなるものであり(少なくとも、甲3文献には、当該音響信号が、ヘッダ信号、測距信号などのように、性格の異なる複数の信号で構成されるものであることをうかがわせる記載は見当たらない。)、全ての海底局は船上局から同一の送信信号を受信し、海底局ごとに異なる返信信号を船上局に返信するものであるから、音響信号の具体的構成の点からも、海底局の返信動作の点からも、既設の海底局を改造することなく有効利用するとの課題の解決に向けた思想は全くうかがわれない。 このように、甲2発明と甲3発明とは、既設の海底局を改造することなく有効利用するとの課題解決の点において相違している上に、甲3発明における音響信号の具体的構成及び海底局の返信動作に照らせば、甲2発明に甲3構成b3を適用すると、かえって当該課題の解決ができないこととなる。 (C) そうすると、甲2発明に甲3構成b3を適用する動機づけがあるということはできず、むしろ阻害要因があるというべきである。 したがって、相違点1に係る本件発明1の構成は、甲2発明と甲3文献に記載された構成に基づいて、当業者が容易に想到することができたものとはいえない。 ④裁判所は、原告の主張について次のように判断しました。 (A)原告は、ミラー応答方式であるか否かの違いは単なる技術的な選択事項にすぎないから、甲2文献及び甲3文献の記載事項を組み合わせることの阻害要因とならないと主張する。 しかし、かかる違いが技術的選択事項であると認めるに足りる証拠はない。仮にこの点を措くとしても、甲2発明は、ミラー応答方式を採用している既設の海底局を改造することなく有効利用するという課題の解決に向けられたものであるから、ミラー応答方式であることは、甲2発明における必須の構成というべきである。 (B)また、原告は、水中音響測位システムの創作に当たり、当業者において、船上局の送信信号と受信信号とが一連不可分のものであるとの認識は希薄であると主張する。 しかし、原告が主張する、 ①船上局の送信信号を変えれば、船上局の受信信号は既存の海底局の仕様に応じて自動的に決まる、 ②船上局の受信信号を変えるには、船上局の送信信号を既存の海底局の仕様に応じて自動的に決まるものとしなければならない、 との事実は、結局のところ、船上局の送信信号と受信信号との間に強い相関があることを示しているというべきであるから、原告の主張は失当といわざるを得ない。 (C)このほか原告は種々の主張をするが、先に説示した阻害要因を覆すに足りる事情があると認めることはできない。 |
| [コメント] |
|
①阻害要因に関する判例として、平成8年(行ケ)91号(インダクタンス素子事件)があります。 これは、複数の引用文献を組み合わせることの動機付けがあるときでも、組み合わせによる変更が、引用文献の発明の目的の方向に反する変更となるときには、特許出願人(又は特許権者)の発明に想到することを妨げる要因(阻害要因)となり得る旨を判示しています。 ②本事例は、インダクタンス素子事件に類似するケースであり、既存の海底局を改造せずに利用するという課題を有する主引用例に、その課題の達成ができなくなるような副引用例を組み合わせることには、阻害要因があると判断されました。 ③もっとも、こうした阻害要因の型(発明の目的に反する)に当てはまるから、常に進歩性が肯定されるというものでもないと考えます。 この事例では、原告は、 ・主引用例の構成のうちの「一斉受信の際にどの海底局からも同じ測距信号が船上局に返信される」という構成要件を、副引用例の「一斉送信の差異に海底局ごとに異なる測距信号が返信させる」という構成要件に置き換える、 ・さらに主引用例がミラー応答方式を採用しているものとする という論理で進歩性を否定しようとしました。 こうした論理展開が当業者にとって自明であるかなどを含めて総合評価した上で、原告による進歩性否定の論理付けには、阻害要因があると判断したものと推察されます。 |
| [特記事項] |
| 戻る |
今岡憲特許事務所 : 〒164-0003 東京都中野区東中野3-1-4 タカトウビル 2F
TEL:03-3369-0190 FAX:03-3369-0191
営業時間:平日9:00~17:20
今岡憲特許事務所TOPページ | はじめに | 特許について | 判例紹介 | 事務所概要 | 減免制度 | リンク | 無料相談
Copyright (c) 2014 今岡特許事務所 All Rights Reserved.